10. 双子のパラドックス 追記
この問題では、二人の観測者 \(\cal{O}_E\), \(\cal{O}_R\) を考えました。
質点の運動を記述した座標系 \(K\) は \(\cal{O}_E\) が静止している座標系ですが、時間と空間の原点は、折り返し地点であり、 \(\cal{O}_E\) を \(\cal{O}_R\) が出発した時刻と位置を原点とする座標系 \(K_E\) とは定数の差があります。
(10.1)\[\begin{split}\begin{cases}
x &= x_e - D/2 \\
t &= t_e - T/2
\end{cases}\end{split}\]
\(D\) および \(T\) はロケットの出発時の速度 \(v=c \beta\) と
(10.2)\[\begin{split}\begin{cases}
D &= \frac{2 c^2}{\alpha} \frac{1- \sqrt{1-\beta^2}}{\sqrt{1-\beta^2}}
= \frac{2 c^2}{\alpha} \left(\frac{1}{\sqrt{1-\beta^2}} - 1 \right) \\
T/2 &= \frac{\beta c}{\alpha\sqrt{1-\beta^2}}
\end{cases}\end{split}\]
で関係付られています。
次に 系 \(K\) の時刻 \(t\) で \(\cal{O}_R\) (ロケット)と 同じ速度で動いている 慣性系 \(K_\tau\) を考えます。
ロケットの速度 \(u(\tau)= -c \tanh\left(\frac{\alpha\tau}{c}\right)\) を使い、 \(K\) の座標 \(t, x\) と \(K_\tau\) の座標 \(t_\tau,x_\tau\) との間のローレンツ変換は 原点のズレを考慮して、
(10.3)\[\begin{split}\begin{cases}
x - x_o(\tau) &= \frac{1}{\sqrt{1-\frac{u(\tau)^2}{c^2}}} \left( x_\tau + u(\tau) \left(t_\tau - \tau\right) \right) \,,\\
t - t_o(\tau) &= \frac{1}{\sqrt{1-\frac{u(\tau)^2}{c^2}}} \left( t_\tau - \tau + \frac{u(\tau)}{c^2} x_\tau\right) \,,\\
\end{cases}\end{split}\]
あるいは、
(10.4)\[\begin{split}\begin{cases}
x_\tau &= \frac{1}{\sqrt{1-\frac{u(\tau)^2}{c^2}}} \left( x - x_o(\tau) - u(\tau) \left(t - t_o(\tau)\right)\right) \,,\\
t_\tau -\tau &= \frac{1}{\sqrt{1-\frac{u(\tau)^2}{c^2}}} \left( t - t_o(\tau) - \frac{u(\tau)}{c^2} \left(x - x_o(\tau)\right)\right) \,, \\
\end{cases}\end{split}\]
となります。\(x_o(\tau), t_o(\tau)\) を系 \(K\) でのロケットの位置および時刻そのものとすると、
(10.5)\[\begin{split}\begin{cases}
x_o(\tau) = & -\frac{c^2}{\alpha} \left(\cosh\left(\frac{\alpha\tau}{c}\right) - 1\right)
\\
t_o(\tau) = & \frac{c}{\alpha} \sinh\left(\frac{\alpha\tau}{c}\right)
\end{cases}\end{split}\]
系 \(K_\tau\) はロケットの時刻 \(t_o\) での瞬間静止系ということになります。
次にロケットがこの瞬間静止系に静止している瞬間( \(t_\tau=\tau\) )の、この瞬間静止系での、観測者 \(\cal{O}_E\) の位置と時刻を求めてみます。系 \(K\) では、 \(\cal{O}_E\) の座標は x= -D/2 で一定です。
(10.6)\[\begin{split}\begin{cases}
x_\tau &= \frac{1}{\sqrt{1-\frac{u(\tau)^2}{c^2}}} \left( -D/2 - x_o(\tau) - u(\tau) \left(t - t_o(\tau)\right)\right) \,,\\
0 &= \frac{1}{\sqrt{1-\frac{u(\tau)^2}{c^2}}} \left( t - t_o(\tau) - \frac{u(\tau)}{c^2} \left(-D/2 - x_o(\tau)\right)\right) \,, \\
\end{cases}\end{split}\]
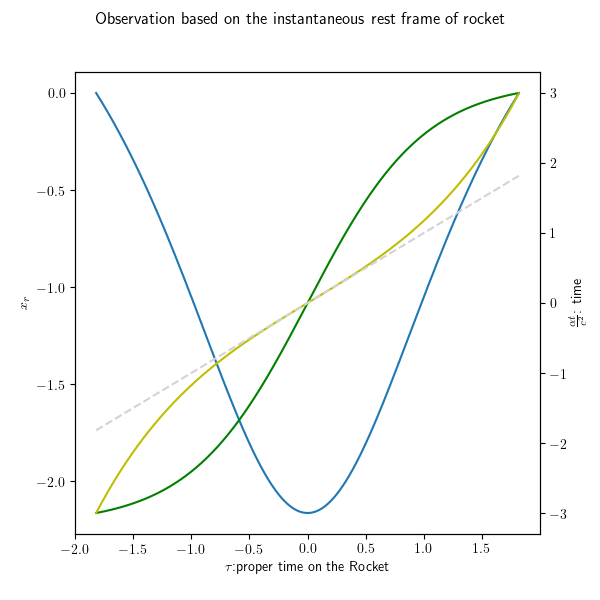
これより、 \(\cal{O}_R\) が観測する \(\cal{O}_E\) の位置は、
(10.7)\[\begin{split}x_r(\tau) &= \sqrt{1 - \frac{u(\tau)^2}{c^2}}\left( -D/2 - x_o(\tau)\right)\\
&= - \frac{1}{{\cosh\left(\frac{\alpha\tau}{c}\right)}}\left( D/2 -\frac{c^2}{\alpha} \left(\cosh\left(\frac{\alpha\tau}{c}\right) - 1\right)\right)\\\end{split}\]
であって、この時 \(\cal{O}_E\) の時計は、
(10.8)\[\begin{split}{\tilde t} &= t_o(\tau) + \frac{u(\tau)}{c^2}\left(-D/2 - x_o(\tau)\right) \\
&= \frac{c}{\alpha} \sinh\left(\frac{\alpha\tau}{c}\right)
+ \frac{u(\tau)}{c^2} \left(-D/2 + \frac{c^2}{\alpha} \left(\cosh\left(\frac{\alpha\tau}{c}\right) - 1\right)\right)\\
&= \frac{c}{\alpha} \sinh\left(\frac{\alpha\tau}{c}\right)
- \frac{\tanh{\left(\frac{\alpha\tau}{c}\right)}}{c}\left(-D/2+ \frac{c^2}{\alpha} \left(\cosh\left(\frac{\alpha\tau}{c}\right) - 1\right)\right)\\
&= \frac{\tanh{\left(\frac{\alpha\tau}{c}\right)}}{c}\left(D/2 + \frac{c^2}{\alpha}\right)\\
& =\frac{c\tanh{\left(\frac{\alpha\tau}{c}\right)}}{\alpha \sqrt{1-\beta^2}}\end{split}\]
を指していると観測することになります。これを \(\tau\) について微分すると、
(10.9)\[\begin{split}\frac{d {\tilde t}}{d\tau} & = \frac{1}{\cosh^2{\left( \frac{\alpha \tau}{c} \right)}}\left(\frac{\alpha D}{2c^2} + 1 \right)\\
& = \left(1- \frac{u^2}{c^2}\right) \frac{1}{\sqrt{1-\beta^2}}\end{split}\]
です。 この式から折り返し点付近( \(\tau \sim 0\) つまり \(u \sim 0\) )では、 \({\tilde t}\) は \(\tau\) よりも早くすすむことが分かります。またこの進み方は、折り返し点でのロケットから地球までの距離と加速度の積に比例する項がが存在します。これは重力ポテンシャルに相当する量です。出発時や到着時には
(10.10)\[\frac{d {\tilde t}}{d\tau}(\tau_s) = \frac{1}{\cosh{\frac{\alpha \tau_s}{c}}} = \sqrt{1 - \beta^2 } < 1\]
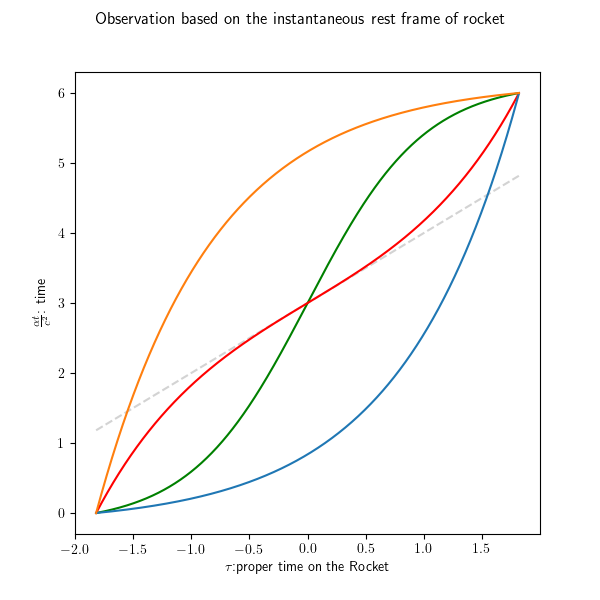
ですから、ロケットから観測する地球の時計はゆっくり進むと観測されることも分かります。
図-9.6 で示した望遠鏡を通じて観測した時計の進みと、座標系に基づく観測による時計の進みを合わせて 図-10.2 に表示しました。双子のパラドックスにおける二人の観測者が見る時間の進み具合の違いが良く分かるかと思います。